RGB遥感影像分割¶
本案例基于PaddleX实现遥感影像分割,提供滑动窗口预测方式,以避免在直接对大尺寸图片进行预测时显存不足的发生。此外,滑动窗口之间的重叠程度可配置,以此消除最终预测结果中各窗口拼接处的裂痕感。
前置依赖¶
- Paddle paddle >= 1.8.4
- Python >= 3.5
- PaddleX >= 1.1.4
安装的相关问题参考PaddleX安装
下载PaddleX源码:
git clone https://github.com/PaddlePaddle/PaddleX
cd PaddleX
git checkout release/1.3
该案例所有脚本均位于PaddleX/examples/remote_sensing/,进入该目录:
cd PaddleX/examples/remote_sensing/
数据准备¶
本案例使用2015 CCF大数据比赛提供的高清遥感影像,包含5张带标注的RGB图像,图像尺寸最大有7969 × 7939、最小有4011 × 2470。该数据集共标注了5类物体,分别是背景(标记为0)、植被(标记为1)、道路(标记为2)、建筑(标记为3)、水体(标记为4)。
本案例将前4张图片划分入训练集,第5张图片作为验证集。为增加训练时的批量大小,以滑动窗口为(1024,1024)、步长为(512, 512)对前4张图片进行切分,加上原本的4张大尺寸图片,训练集一共有688张图片。在训练过程中直接对大图片进行验证会导致显存不足,为避免此类问题的出现,针对验证集以滑动窗口为(769, 769)、步长为(769,769)对第5张图片进行切分,得到40张子图片。
运行以下脚本,下载原始数据集,并完成数据集的切分:
python prepare_data.py
模型训练¶
分割模型选择Backbone为MobileNetv3_large_ssld的Deeplabv3模型,该模型兼备高性能高精度的优点。运行以下脚本,进行模型训练:
python train.py
也可以跳过模型训练步骤,直接下载预训练模型进行后续的模型预测和评估:
wget https://bj.bcebos.com/paddlex/examples/remote_sensing/models/ccf_remote_model.tar.gz
tar -xvf ccf_remote_model.tar.gz
模型预测¶
直接对大尺寸图片进行预测会导致显存不足,为避免此类问题的出现,本案例提供了滑动窗口预测接口,支持有重叠和无重叠两种方式。
- 无重叠的滑动窗口预测
在输入图片上以固定大小的窗口滑动,分别对每个窗口下的图像进行预测,最后将各窗口的预测结果拼接成输入图片的预测结果。由于每个窗口边缘部分的预测效果会比中间部分的差,因此每个窗口拼接处可能会有明显的裂痕感。
该预测方式的API接口详见overlap_tile_predict,使用时需要把参数pad_size设置为[0, 0]。
- 有重叠的滑动窗口预测
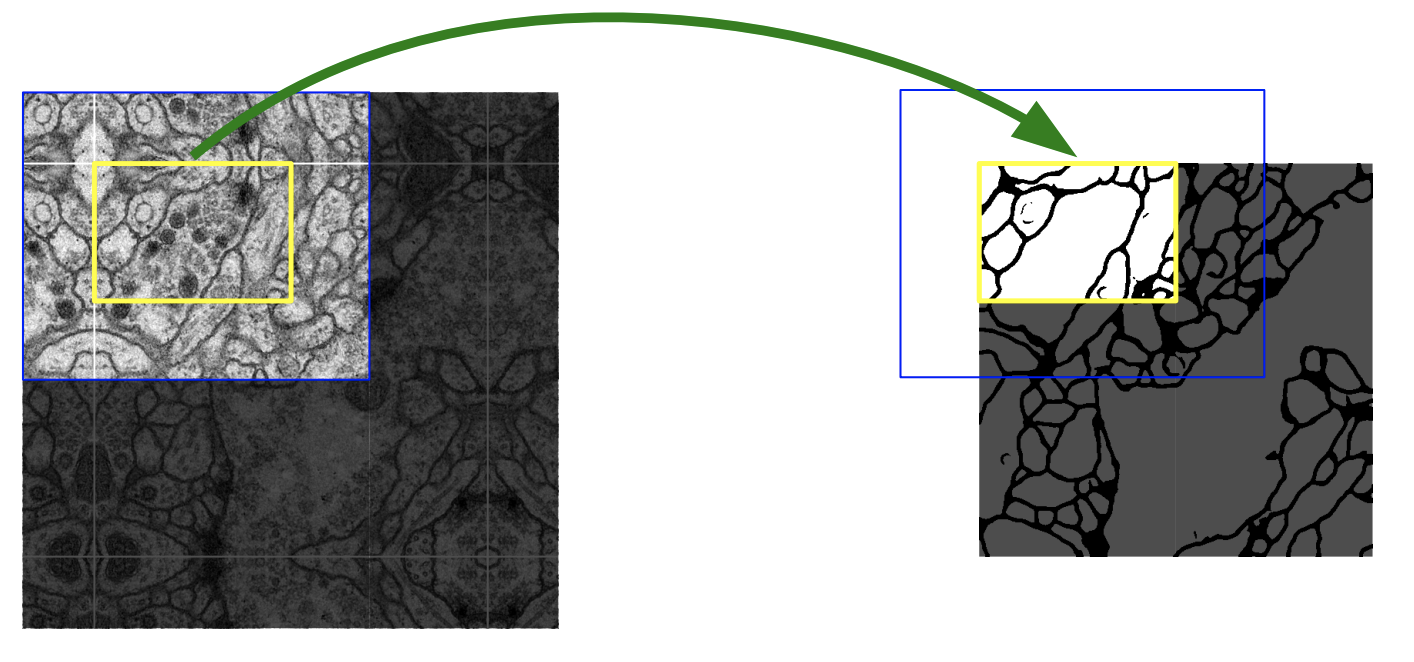
在Unet论文中,作者提出一种有重叠的滑动窗口预测策略(Overlap-tile strategy)来消除拼接处的裂痕感。对各滑动窗口预测时,会向四周扩展一定的面积,对扩展后的窗口进行预测,例如下图中的蓝色部分区域,到拼接时只取各窗口中间部分的预测结果,例如下图中的黄色部分区域。位于输入图像边缘处的窗口,其扩展面积下的像素则通过将边缘部分像素镜像填补得到。
该预测方式的API接口说明详见overlap_tile_predict。
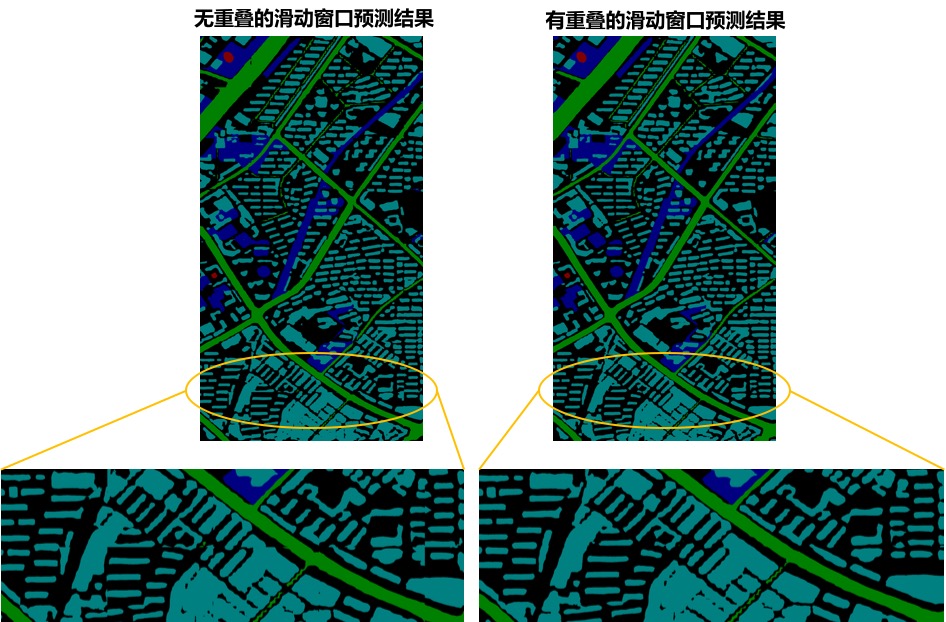
相比无重叠的滑动窗口预测,有重叠的滑动窗口预测策略将本案例的模型精度miou从80.58%提升至81.52%,并且将预测可视化结果中裂痕感显著消除,可见下图中两种预测方式的效果对比。
运行以下脚本使用有重叠的滑动窗口进行预测:
python predict.py
模型评估¶
在训练过程中,每隔10个迭代轮数会评估一次模型在验证集的精度。由于已事先将原始大尺寸图片切分成小块,此时相当于使用无重叠的大图切小图预测方式,最优模型精度miou为80.58%。运行以下脚本,将采用有重叠的大图切小图的预测方式,重新评估原始大尺寸图片的模型精度,此时miou为81.52%。
python eval.py